What’s this about?
This post shows how to wire up and configure RFDesign RFD868x or RFD900x telemetry units to a Pixhawk 2.
Continue reading “Configuring RFD868x/RFD900x Telemetry for Pixhawk 2”

This post shows how to wire up and configure RFDesign RFD868x or RFD900x telemetry units to a Pixhawk 2.
Continue reading “Configuring RFD868x/RFD900x Telemetry for Pixhawk 2”
I’m rebuilding The Groundhog to a more professional level, with the level of accuracy required for the AI and computer vision work planned. It’s also getting an upgrade to the avionics to make it more resilient. This post details the rebuild and also has links to the 3D printed parts used.
In this post we will build a ROS node on a companion computer to subscribe to data being published by the flight control unit (FCU). This will allow us to use the many data streams available from the flight controller as inputs to our system and then be able to make decisions over how the UAV should be controlled.
Continue reading “2. Coding UAVs with ROS. Subscribing to FCU data.”
This series of posts is for those who want to take more control of their UAV (or other robotic vehicle) using a companion computer connected to the flight control unit. Typically to get started, this might be a Raspberry Pi connected to a Pixhawk FCU.

UWE Bristol has been hosting 40 students from the prestigious Ecole des Mines d’Ales for the last four weeks for a Summer School in coding.
Continue reading “Autonomous UAV Coding Summer School – UWE Bristol Follow Up”
22 students from France will be spending the next two weeks building and coding autonomous drones as part of the UWE Bristol Summer School. Along with Miles Isted s’Jacob, I am delighted to be leading on this activity and have produced a short sneak peek video of the challenge to share.
So six team drones racing autonomously on a single track? What’s not to like?
Code is based on that used for MAAXX Europe, so Python Dronekit, with ArduCopter on Pixhawk. However, the final code will be posted on my github at the end of the Summer School.
If you have heard of Robot Operating System and want to use it to monitor and control UAV flight, this post will get you started…
More specifically, this post details how to set up a Pixhawk flight controller running PX4 firmware, with a Raspberry Pi3 companion computer running Robot Operating System. This combination will give flexible control over the flight control unit and the ability to integrate a very wide range of features such as depth-sensing cameras and machine learning networks.
Continue reading “Robot Operating System for Flight Monitoring and Control – Getting Started.”
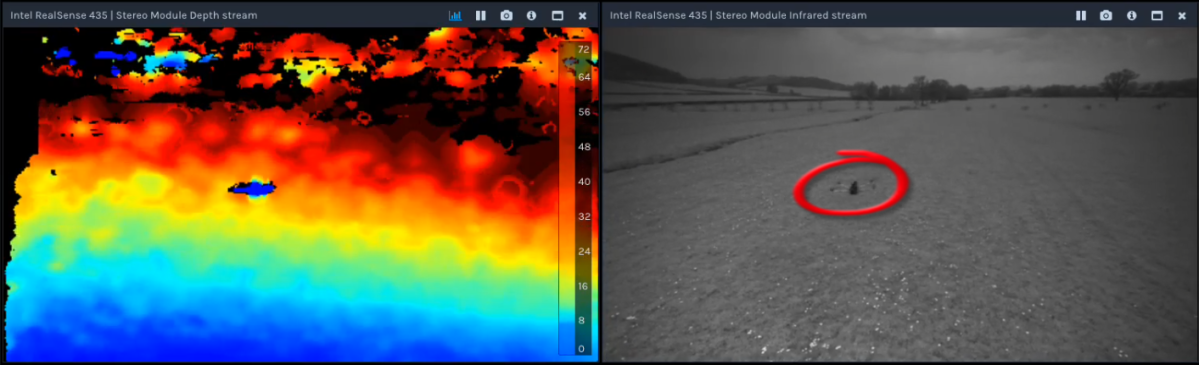
This is part of a series of posts outlining the evolution of my GroundHog hexacopter into a multi-role UAV. It is based on a Pixhawk flight controller with a Jetson TX2 companion computer. It has now been fitted with an Intel RealSense D435 depthcam.
Continue reading “First Flight: Intel RealSense D435 Depth Camera on Jetson TX2”

Here’s a quick technical post for anyone attempting to harness the capabilities of a Realsense D435 camera on a Jetson TX2. For me, this is about getting usable depth perception on a UAV, but it has proved more problematic than I originally anticipated.
This post aims to provide some simple instructions that now work for me, but took a long time to find out!
The Intel librealsense2 library does not support ARM architectures as I write. This causes a fatal compile error when the file librealsense/src/image.cpp is accessed, as it queries the system architecture.
Modify image.cpp as in my Github gist here. This bypasses the architecture check.
I am getting some warnings of incomplete frames, but it’s not clear if this is due to a power issue on the powered hub or a software configuration. Despite this, the provided tools seem to work well and demonstrates some of the best depth camera capabilities I have seen (and this is my third depth camera to date).

(Nb. All resources for this post can be found on GitHub at https://github.com/mikeisted/maaxxeurope2018)
It’s been a while since my last post. My research has since moved towards the use of machine learning in UAVs and so my trusty Groundhog now sports a Jetson TX2 instead of a Raspberry Pi and an Intel Realsense depthcam for ‘deep vision’ to match it’s deep learning capabilities. But I digress… so I’ll blog more on this another time…
This post is about the DroneJam coding masterclass for autonomous UAV ‘newbies’ I ran for this year’s MAAXX Europe autonomous drone competition, held in March at the University of the West of England.
Continue reading “MAAXX Europe 2018 DroneJam Coding MasterClass”