
In this short blog series I’m outlining the hardware and software of The Groundhog, my entry into the recent MAAXX-Europe autonomous drone competition held at the University of the West of England, Bristol.
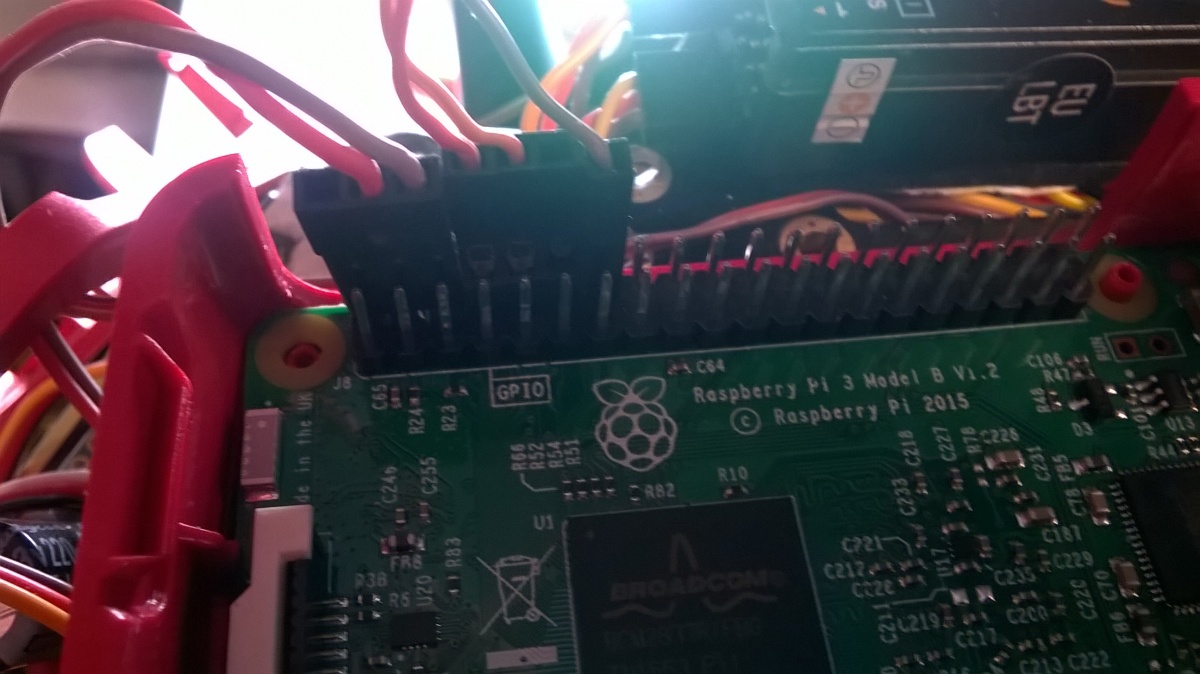
Connecting the Raspberry Pi 3 to the Pixhawk took quite some working out, so I am hoping that by publishing my own step by step checklist, it may help others save a little time. Continue reading “Post 4. MAAXX Europe. Connecting the Pi 3 to the Pixhawk”
